 |
|
|
 |
 |
|
|
|
|
|
 SOFIa hexarotor Bergantin et al. (2021, 2023) © Cyril Frésillon / ISM / CNRS Photothèque |
 Beerotor Robot Expert Ruffier (2015) |
 10-gram MetaFly flapping-wing MAV Ndoye et al. IEEE ICRA 2023 © Cyril Frésillon / ISM / CNRS Photothèque |
 © Germain Verhille |
|
franck.ruffier at cnrs.fr - www.franckruffier.com |

 Flocking-by-eyes: robotic collective behavior based on bio-inspired motion vision –optic flow– (collab. with C. Eloy at Irphé)
Flocking-by-eyes: robotic collective behavior based on bio-inspired motion vision –optic flow– (collab. with C. Eloy at Irphé) 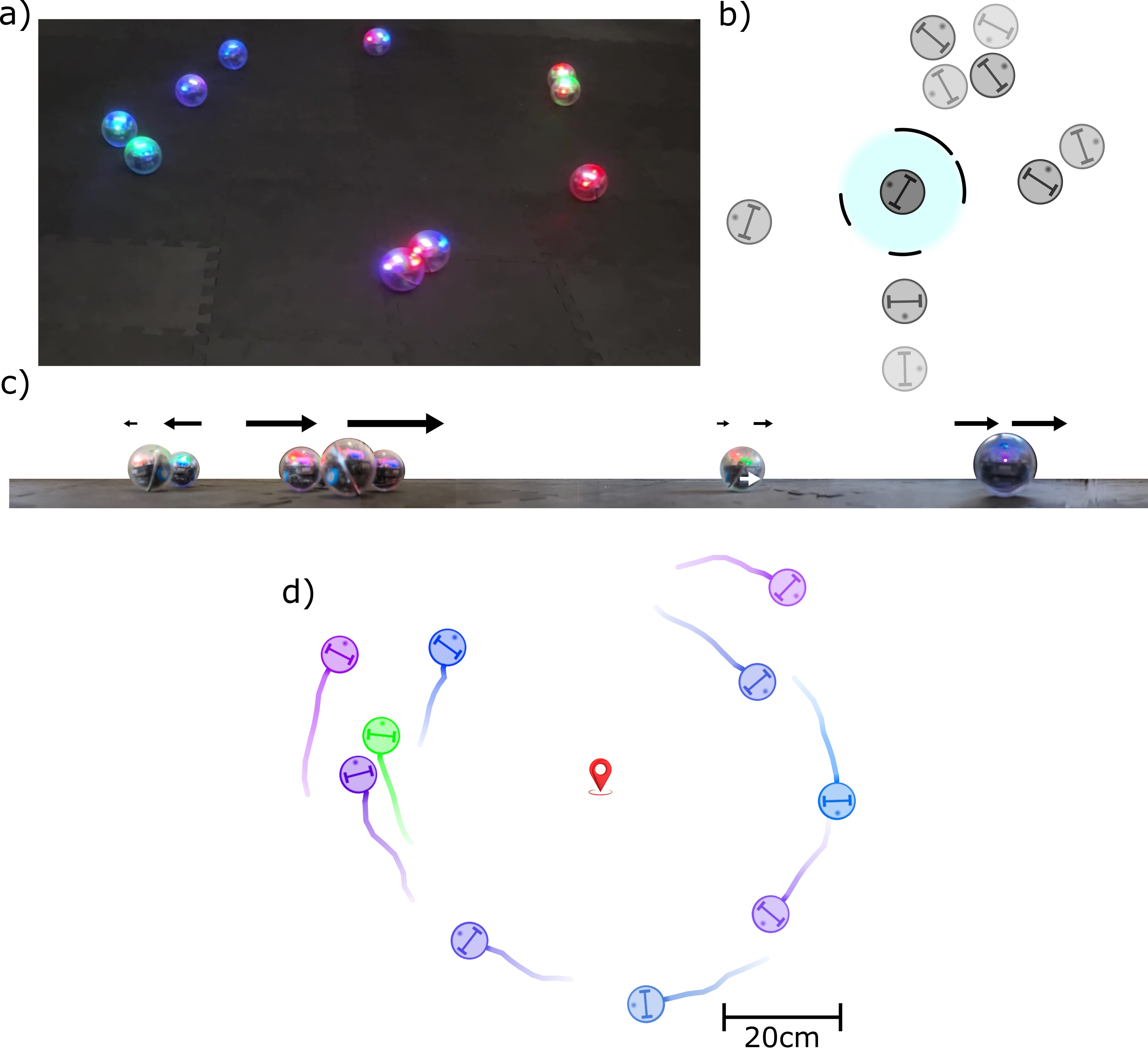
 Flapping-wing: robotization of the MetaFly (collab. with XTIM-BionicBird) -> Ndoye et al. IEEE ICRA 2023 [Open Dataset] [Actualité publiée par le CNRS] Optic flow-based Attitude stabilisation (collab. with G. de Croon) -> de Croon et al. Nature 2022 [Video abstract EN] [News by TU Delft-CNRS EN] [Actualité publiée par le CNRS] [Comm Presse TU Delft - CNRS]
Flapping-wing: robotization of the MetaFly (collab. with XTIM-BionicBird) -> Ndoye et al. IEEE ICRA 2023 [Open Dataset] [Actualité publiée par le CNRS] Optic flow-based Attitude stabilisation (collab. with G. de Croon) -> de Croon et al. Nature 2022 [Video abstract EN] [News by TU Delft-CNRS EN] [Actualité publiée par le CNRS] [Comm Presse TU Delft - CNRS] 
 SOFIa: Optic flow-based odometry on a hexarotor -> Simulation: Bergantin et al. 2021 Aerial Robot: Bergantin et al. 2023 [News CNRS EN] [Actualité publiée par le CNRS] Ship landing & ecological interface (collab. with A. Morice) -> Thomas et al. 2023
SOFIa: Optic flow-based odometry on a hexarotor -> Simulation: Bergantin et al. 2021 Aerial Robot: Bergantin et al. 2023 [News CNRS EN] [Actualité publiée par le CNRS] Ship landing & ecological interface (collab. with A. Morice) -> Thomas et al. 2023 AceBot: Biomimetic target tracking -> Colonnier et al. 2019
AceBot: Biomimetic target tracking -> Colonnier et al. 2019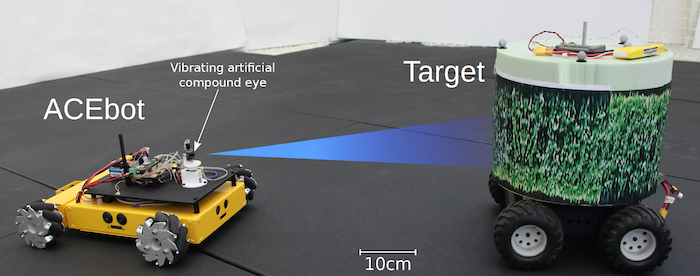 CurvACE: Miniature and programmable artificial compound eye -> Floreano et al. 2013 , www.curvace.org
CurvACE: Miniature and programmable artificial compound eye -> Floreano et al. 2013 , www.curvace.org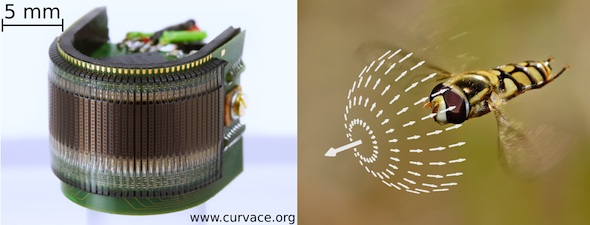 BioCarBot: Minimalistic optic flow sensors applied to indoor and outdoor visual guidance and odometry on a car-like robot -> Mafrica et al. 2016
BioCarBot: Minimalistic optic flow sensors applied to indoor and outdoor visual guidance and odometry on a car-like robot -> Mafrica et al. 2016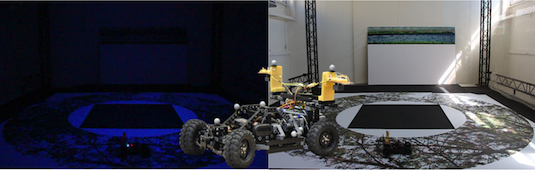 X-Morf quadrotor: In-flight morphing -> Desbiez et al. 2017
X-Morf quadrotor: In-flight morphing -> Desbiez et al. 2017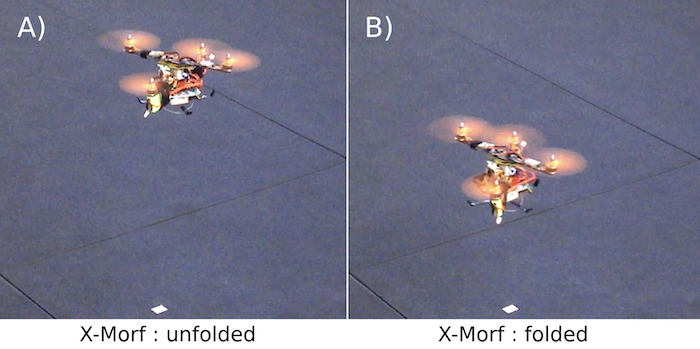 3D Shape-Adjusted Tridimensional Reconstruction with X4-Mag -> Louiset et al. 2016
3D Shape-Adjusted Tridimensional Reconstruction with X4-Mag -> Louiset et al. 2016 Optic flow and Honeybees in tunnel -> Serres et al. 2008b; Portelli et al. 2010a, 2010b, 2011, 2016
Optic flow and Honeybees in tunnel -> Serres et al. 2008b; Portelli et al. 2010a, 2010b, 2011, 2016 © DGA / F. Vrignaud |
 © Portelli, Serres, Ruffier (CNRS - Aix-Marseille Univ.) |
 © Lenay, Vrignaud, Portelli, Serres, Ruffier (CNRS - Aix-Marseille Univ.) |
 © Portelli, Serres, Ruffier (CNRS - Aix-Marseille Univ.) |
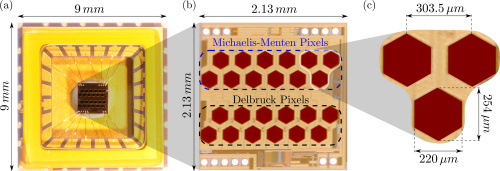
BeeRotor Robot -> Expert Ruffier (2012), Expert Ruffier (2015)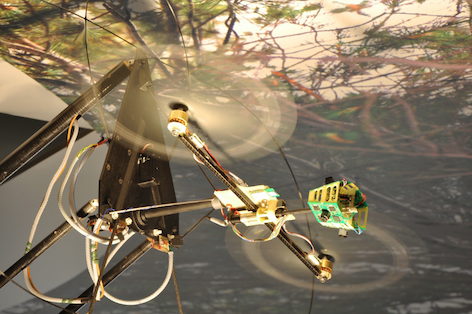 Miniature Optic flow sensor and Biomimetic Retina -> Ruffier et al 2003 ; Roubieu et al 2012; Expert et al 2011 ; M2APix: Mafrica et al 2015
Miniature Optic flow sensor and Biomimetic Retina -> Ruffier et al 2003 ; Roubieu et al 2012; Expert et al 2011 ; M2APix: Mafrica et al 2015 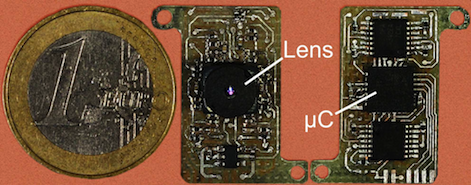
 LORA project -> Simulation: Serres et al 2008a; Robotics: Roubieu et al 2014
LORA project -> Simulation: Serres et al 2008a; Robotics: Roubieu et al 2014 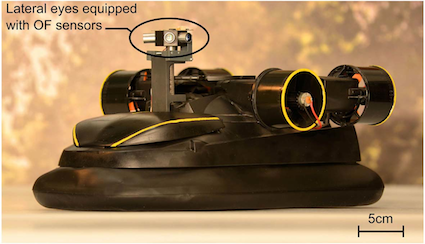 OCTAVE Robot -> Ruffier Franceschini (2005); Ruffier Franceschini (2015)
OCTAVE Robot -> Ruffier Franceschini (2005); Ruffier Franceschini (2015)  © H. Raguet |
| Autres videos et Chaîne YouTube - |
January 2014. X4 MaG Aerial Robot at Marseille... par augustin-manecy |
|
Biorobotique : oeil de la mouche par ministeredeladefense | La fleur de la Biorobotique à Nantes (2011) par NANTES7 |
PostdocsEtudiants en thèseDoctorants ayant soutenu leur thèseAutres AlumniListe complète de Publications| Distinctions |
| "ICAR Outstanding paper award" au congrès IEEE sur la Robotique Avancée (ICAR 2003), Coimbra, Portugal |
| "ICRA Best vision paper finalist" at IEEE ICRA 2004, New Orleans, USA |
| Prix La Recherche 2005, Mention Mobilité pour "Des robots fine mouches" N. Franceschini, S. Viollet, F. Ruffier |
| "IEEE Sensors 2011, Best Student paper Award, First Prize", Roubieu et al. |
| Enseignements | ||||||
| Cours Biorobotique & Thymio - NCC Toulouse Sept 2021 - :
| ||||||
| Cours Intro Biorobotique Partie I (pdf) | ||||||
| Cours Intro Biorobotique Partie II (pdf) | ||||||
| Ateliers Thymio (pdf) | ||||||
| Corrigé Suivi de Ligne Basique Suivi de ligne | ||||||
| Corrigé Suivi de Ligne Avancé Suivi de bord ligne avec T et récupération de la ligne | ||||||
| Corrigé Labyrinthe Labyrinthe | ||||||
| Membre de l'équipe pédagogique Master Physique-Biologie, Marseille, Parcours bionique et cybernétique
| Master Européen EMARO (European Master on Advanced RObotics), Nantes, Biorobotics (12 h), 2009/2010, 2010/2011, ...
| Master Recherche Neurosciences, Marseille, spécialité Neurosciences Intégratives et Cognitives, Cognition Naturelle et Artificielle (12 h, M1-S2-UE16), 2008-...
| Robotique d'inspiration biologique , Cours (4h), Ecole d'ingénieur ISEN Toulon (niveau Bac +5), 2006/2007
| Robotique d'inspiration biologique (terrestre et aérienne), Cours (6h), Ecole d'ingénieur CESTI-SUPMECA Toulon (niveau Bac +5), 2003/2004
| Electronique numérique, Travaux Pratiques, IUT Marseille (Département Génie Électrique et Informatique Industrielle, GEII) (niveau Bac +1), 2002/2003
| |
| Rapport, Thèse, Livre |
| Franck RUFFIER DE L'INSECTE AUX ROBOTS : OBSERVER, RECONSTRUIRE, INNOVER ET MIEUX COMPRENDRE PDF , Habilitation at Aix-Marseille Université defended in february 2013 |
| Pilote automatique biomimétique - Système générique inspiré du contrôle visuomoteur des insectes pour : le décollage, le suivi de terrain, la réaction au vent et l'atterrissage automatiques d'un micro-aéronef - , Thèse de doctorat de l'INP Grenoble (spécialité : Signal, Image, Parole, Télécommunications) soutenue le 6 septembre 2004 |
| Franck RUFFIER, Pilote automatique biomimétique - Système générique inspiré du contrôle visuomoteur des insectes pour : le décollage, le suivi de terrain, la réaction au vent et l'atterrissage automatiques d'un micro-aéronef - , 200 pages, Editions Universitaires Europeennes (septembre 2010), ISBN-10: 613152534X, ISBN-13: 978-6131525346 |
| Control of a High Voltage Supply for a Traveling Wave Tube Transmitter Projet de fin d'étude et DEA réalisés à Lund (Suède) pour Ericsson Microwave System (en anglais) |

|
| Travaux antérieurs de l'équipe |
|
Circuit Détecteur Elémentaire de Mouvement (DEM)
Rapport de DEA de Christian BLANES, Juin 1986, Neurosciences, Univ. Aix-Marseille II "Realisation d'un circuit électronique Détecteur Elémentaire de Mouvement (DEM)," titre du Chapitre VI, pp. 25 (pagination du rapport) ou pp. 30 (pagination du fichier pdf) Schéma du circuit DEM, pp. -34.1- (pagination du rapport) ou pp. 40 (pagination du fichier pdf) |
|
Le robot Mouche (De la Mouche au Robot Video Divx)
|
{kind=link}