Projets en cours
Projet ANR OrigaBot(Robots Origami Reconfigurables pour une Locomotion Multi-modale) 2019 - 2022

Projets passés
- Projet européen CURVACE (ICT-FET Open): Oeil composé artificiel
- Coordinateur du projet ANR IRIS (Intelligent Retina for Innovative Sensing)
- Projet ANR ROBOTEX ROBOTEX (financement EQUIPEX): Mise en oeuvre d'une grande arène de vol pour robots
- Projet ANR EVA (Entomoptère Volant Autonome) EVA
Projet européen CURVACE (Curved Artificial Compound Eyes)
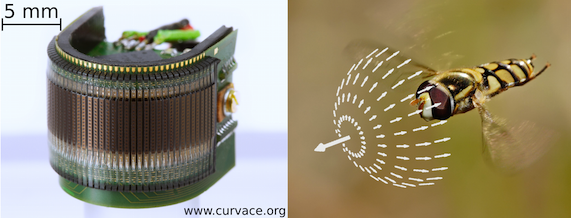 Œil composé CurvACE (photo de gauche), premier œil composé artificiel courbe capable de mesurer le défilement des objets dans son champ visuel panoramique – vecteurs de flux optique (photo de droite) – à la manière d’un insecte en vol.
Œil composé CurvACE (photo de gauche), premier œil composé artificiel courbe capable de mesurer le défilement des objets dans son champ visuel panoramique – vecteurs de flux optique (photo de droite) – à la manière d’un insecte en vol.
Projet ANR IRIS (Intelligent Retina for Innovative Sensing)
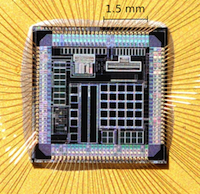 Rétine APIS (Photo S. Viollet)
Rétine APIS (Photo S. Viollet)
Projet ANR ROBOTEX ROBOTEX
- Responsable de la mise en oeuvre d'une grande arène de vol : 8m x 8m x 6m (haut) incluant à terme 16 caméras VICON T40S pour la localisation 3D
- Co-encadrement avec Nicolas Marchand (Gipsa-lab) de la thèse d'Augustin Mannecy : Stabilisation en vol stationnaire par pilotage du regard
- Augustin Manecy est à l'origine de la toute nouvelle toolbox permettant de programmer une cible embarquant Linux (Gumstix) à partir de l'environnement Matlab/Simulink : RT-MaG toolbox
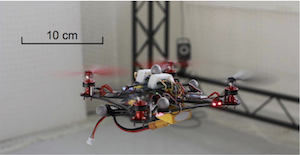 X4-MaG quadrotor développé par ISM (Marseille) et Gipsa-Lab (Grenoble) (Photo: A. Manecy)
X4-MaG quadrotor développé par ISM (Marseille) et Gipsa-Lab (Grenoble) (Photo: A. Manecy)
Projet ANR EVA (Entomoptère Volant Autonome) EVA
- Conception et réalisation d'un capteur de flux optique miniature intégrant au niveau des pixels une fonctions d'auto-adaptation locale
- Co-encadrement avec Franck Ruffier (ISM) de la thèse de Frédéric Roubieu: Pilotage automatique bio-inspiré pour aéroglisseur (robot LORA)
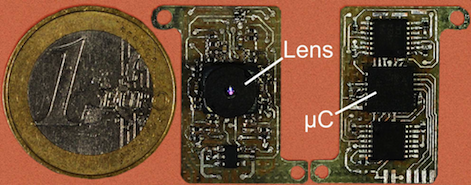 Optic flow sensor (Roubieu et al. 2011)
Optic flow sensor (Roubieu et al. 2011)
